
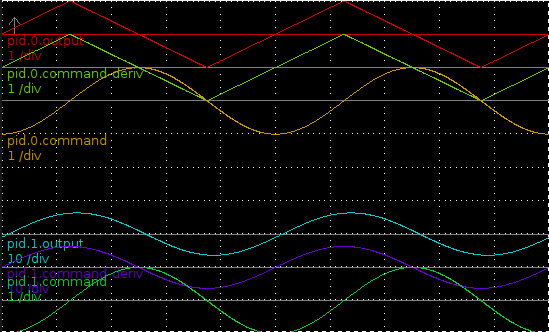
Due to an oversight, the command-deriv value was only being used when computing the contribution of Dgain, and not to FF1. This corrects the problem. Before this change, with IPD FF0 FF2 gains all 0 and FF1=1, pid.0.output was a (co)sine wave rather than a triangle, when its command was driven from a sine and its command-deriv from a triangle.
My halrun -I testing script:
“
loadrt threads
loadrt pid num_chan=2 debug=1
loadrt siggen
addf siggen.0.update thread1
addf pid.0.do-pid-calcs thread1
addf pid.1.do-pid-calcs thread1
net cmd siggen.0.sine pid.0.command pid.1.command
net cmdderiv siggen.0.triangle pid.0.command-deriv
setp pid.0.FF1 1
setp pid.1.FF1 1
setp pid.0.Pgain 0
setp pid.1.Pgain 0
setp pid.0.enable true
setp pid.1.enable true
start
#loadusr halscope
Closes: #466
![[gnea/grbl-Mega Issue#1] $ command extentions](https://www.grblhal.com/wp-content/themes/gitphp/timthumb.php?src=https://www.grblhal.com/wp-content/themes/gitphp/assets/img/pic/8.jpg&h=110&w=185&q=90&zc=1&ct=1)
![[gnea/grbl-Mega Issue#2] Better interrupt priorities](https://www.grblhal.com/wp-content/themes/gitphp/timthumb.php?src=https://www.grblhal.com/wp-content/themes/gitphp/assets/img/pic/11.jpg&h=110&w=185&q=90&zc=1&ct=1)
![[gnea/grbl-Mega Issue#3] ATMega16U2 virtual com port on ATMega2560](https://www.grblhal.com/wp-content/themes/gitphp/timthumb.php?src=https://www.grblhal.com/wp-content/themes/gitphp/assets/img/pic/10.jpg&h=110&w=185&q=90&zc=1&ct=1)
![[gnea/grbl-Mega Issue#4] Real-time adjustable feedrates](https://www.grblhal.com/wp-content/themes/gitphp/timthumb.php?src=https://www.grblhal.com/wp-content/themes/gitphp/assets/img/pic/7.jpg&h=110&w=185&q=90&zc=1&ct=1)
{kind=link}